

シンカイ君XF シンカイクン エックスエフ
Ranking>
シンカイ君XF
Infomation
| Robot ID | 837 |
| Robot name | シンカイ君XF |
| Robot kana | シンカイクン エックスエフ |
| Robot eng | shinkaikunXF |
| Team name | team.shinkai.lab |
| Team kana | チーム.シンカイ.ラボ |
| Team eng | team.shinkai.lab |
| Weight | kg |
| Height | cm |
| Country | 日本 |
Comment
今回のテーマ「実機とモデルの整合性を図る」
これまで静止した相手に対しても、技を当てる確実性に欠けていました。
そこで、”静止した相手に対し確実に有効打を取る”を目標に、実機とシミュレーションモデルのパラメータを近づけるように開発を進めました。
改良したポイント
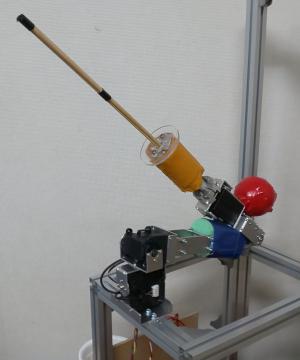
1.ロボット(実機)の再設計
・サーボへの負荷を減らすため曲げ加工を中心に採用
・伸び値取得のための曲げ試験実施と、スコヤによる直角度の確認で高い部品精度を実現
・規格品のアルミフレームの採用で、ロボットとカメラセンサの位置を明確化
2.角度測定機の作製
・ロボットの基準面とカメラセンサのなす角度を正確に測定するため、角度測定器を自作
・角度測定器はジャイロセンサを用い、精度を評価して使用
3.ロボットとカメラセンサの座標系補正
・ロボットとカメラセンサを連動させ、ロボットとカメラセンサの座標系を一致させるよう補正
ロボットのシステム
(i) ダミーロボットの位置検出
・Intel RealSense Depth Camera D435(深度カメラセンサ)を用いて色と形状の情報からダミーロボットの面、小手、胴の位置情報を取得
・ポイントクラウドを生成し、各中心座標を得る
(ii) ロボットの姿勢決定
・カメラセンサで取得した座標情報を元にロボットの姿勢(各関節角度)を計算
・処理負荷の小さい”CCD IK”を使用
・関節を仮想的に動かし徐々に動きを小さくして解を得る
(iii) サーボの制御
・IKの計算結果を元にPCからSTM32 Nucleo Boardへ各関節角度を送信
・各関節角度となるようにSTM32 Nucleo Boardで各サーボと通信
ロボットの使用サーボモータ
・ROBOT SERVO RS406CB(双葉電子工業) x2
・KRS-2552RHV ICS(近藤科学) x2
チームシンカイラボについて
第4回大会から参加。第6回大会から自動ロボットにも挑戦。
技術は向上しつつあるものの、徐々に積み重なっていく開発費。
果たして当日、完璧なパフォーマンスで勝利し、開発費を手にすることはできるのか?
天才プログラマー(兼漫画家)gyojirによる、勝利へ導く華麗な制御に乞うご期待!
これまで静止した相手に対しても、技を当てる確実性に欠けていました。
そこで、”静止した相手に対し確実に有効打を取る”を目標に、実機とシミュレーションモデルのパラメータを近づけるように開発を進めました。
改良したポイント
1.ロボット(実機)の再設計
・サーボへの負荷を減らすため曲げ加工を中心に採用
・伸び値取得のための曲げ試験実施と、スコヤによる直角度の確認で高い部品精度を実現
・規格品のアルミフレームの採用で、ロボットとカメラセンサの位置を明確化
2.角度測定機の作製
・ロボットの基準面とカメラセンサのなす角度を正確に測定するため、角度測定器を自作
・角度測定器はジャイロセンサを用い、精度を評価して使用
3.ロボットとカメラセンサの座標系補正
・ロボットとカメラセンサを連動させ、ロボットとカメラセンサの座標系を一致させるよう補正
ロボットのシステム
(i) ダミーロボットの位置検出
・Intel RealSense Depth Camera D435(深度カメラセンサ)を用いて色と形状の情報からダミーロボットの面、小手、胴の位置情報を取得
・ポイントクラウドを生成し、各中心座標を得る
(ii) ロボットの姿勢決定
・カメラセンサで取得した座標情報を元にロボットの姿勢(各関節角度)を計算
・処理負荷の小さい”CCD IK”を使用
・関節を仮想的に動かし徐々に動きを小さくして解を得る
(iii) サーボの制御
・IKの計算結果を元にPCからSTM32 Nucleo Boardへ各関節角度を送信
・各関節角度となるようにSTM32 Nucleo Boardで各サーボと通信
ロボットの使用サーボモータ
・ROBOT SERVO RS406CB(双葉電子工業) x2
・KRS-2552RHV ICS(近藤科学) x2
チームシンカイラボについて
第4回大会から参加。第6回大会から自動ロボットにも挑戦。
技術は向上しつつあるものの、徐々に積み重なっていく開発費。
果たして当日、完璧なパフォーマンスで勝利し、開発費を手にすることはできるのか?
天才プログラマー(兼漫画家)gyojirによる、勝利へ導く華麗な制御に乞うご期待!
Assemble
| Name | Num | Description |
|---|---|---|
| RS406CB(双葉電子工業) | 2 | 土台2軸に採用したサーボモータ。高速、高トルクでロボットの軌道性に大きく寄与。 |
| KRS-2552RHV ICS(近藤科学) | 2 | 先端2軸に採用したサーボモータ。軽量で根本のサーボへの負荷を抑えつつ、高出力。 |
| Intel RealSense Depth Camera D435 | 1 | 深度カメラセンサ。相手ロボットの位置情報を取得。 |
| STM32 Nucleo Board | 1 | サーボモータ制御用のマイコンボード。PCから送られてくる関節角度の値をサーボモータへ指令。 |
History
| 大会名 | 結果 | ポイント |
|---|---|---|
| 第11回ROBO-剣(アーム型) | ROBO剣ベスト16 | 10 pt |
| 第10回ROBO-剣(アーム型) | ROBO剣ベスト8 | 20 pt |
| 第9回ROBO-剣(アーム部門) | ROBO剣ベスト16 | 10 pt |
| 第8回ROBO-剣(アーム部門) | ROBO剣ベスト8 | 20 pt |
| 第7回ROBO-剣 | ROBO剣ベスト8 | 20 pt |
| 第6回ROBO-剣 | ROBO剣4位 | 50 pt |
詳しくはこちら
第5回ROBO-剣参加(遠隔手動操作+ステレオカメラ)
第4回ROBO-剣参加(目視手動操作)

